مقدمه
تمامی پمپ ها باید به صورتی طراحی شوند که نیاز سیستم را بر طرف نمایند. نیاز سیستم توسط هد دینامیکی کل TDH (Total Dynamic Head) بیان می شود. پمپ نسبت به تغییرات سیستم واکنش نشان می دهد. به طور مثال یک پمپ برای انتقال آب شرب یک منطقه با 500 خانه طراحی و نصب می کنیم و بعد از گذر چند سال تعداد خانه ها به 1000 خانه افزایش پیدا می کند. پس منحنی سیستم یا مقاومت سیستم تغییر می کند زیرا که متراژ لوله کشی افزایش یافته است، سطح آب درون مخزن و همچنین دبی جریان درون لوله تغییر می کند. تقاضای جدید در سیستم، نقطه عملکرد پمپ را تغییر می دهد و اگر پمپ نتواند در نقطه جدید به خوبی عمل نماید، پمپاژ سیال توسط پمپ مشکل ساز می شود. بنابراین می توانیم بگوییم که سیستم پمپ را کنترل می کند.
در پایان این درس قادر خواهیم بود به سوالات زیر پاسخ دهیم:
- هد دینامیکی کل به چه صورت محاسبه می شود؟
- چند نوع هد در سیستم وجود دارد؟
- نحوه محاسبه هد پمپ به چه صورت است؟
المان های هد دینامیکی کل (TDH)
منحنی مقاومت سیستم یا هد دینامیکی کل هر سیستم پمپاژ شامل چهار المان هد است. البته برخی از سیستم ها هر چهار المان هد را ندارند. این المان های هد شامل المان های زیر می باشند:
- هد استاتیکی (Hs) یا تغییر در ارتفاع سیال در طول سیستم برابر با اختلاف بین سطح سیال در ابتدای سیستم (منبع) و انتهای سیستم (مصرف کننده) است. در برخی سیستم ها مانند سیستم بسته گردش سیال در رادیاتور خودرو، مقدار هد استاتیکی برابر صفر است.
- هد فشاری (Hp) یا تغییر در فشار در طول سیستم برابر با اختلاف بین فشار سیال در ابتدای سیستم (منبع) و انتهای سیستم (مصرف کننده) است. فرض کنید پمپ سیال را از یک منبع دریافت و به منبع دیگر تخلیه می کند، در این حالت به دلیل اینکه هر دو منبع در فشار اتمسفر قرار دارند، هد فشاری وجود ندارد. در صورت وجود اختلاف فشار، همانند درس هد در برابر فشار، هد فشاری محاسبه می شود.
- هد سرعت (Hv) که در درس هد در برابر فشار به آن اشاره شد. معمولا از هد سرعت در مخزن صرف نظر می شود چون سطح مخزن بزرگ است و سرعت بالا یا پایین شدن سطح ناچیز است.
- هد اصطکاکی (Hf) برابر با افت ناشی از اصطکاک سیال در سیستم است. در واقع این افت ناشی از وجود اصطکاک بین سیال و دیواره لوله ها، شیرها، اتصالات و تجهیزات در سیستم است. از آنجایی که هد اصطکاکی یک اتلاف انرژی است، این انرژی در مصرف کننده دریافت نمی شود.
هد دینامیکی کل
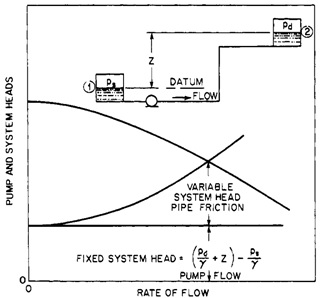
مجموع این چهار هد را برابر با هد دینامیکی کل می نامیم و به دلیل اینکه در حین کارکرد پمپ این پارامتر می تواند تغییر کند به آن هد دینامیکی می گوییم. منحنی مقاومت سیستم برابر است با ترسیم هد دینامیکی کل بر حسب دبی های مختلف. در تصویر زیر یک مثال نمونه برای هد دینامیکی کل مشاهده می کنیم. جهت محاسبه افت در لوله از رابطه دارسی-ویسباخ استفاده شده است. با توجه به این رابطه افت برای لوله ها، اتصالات و شیرها با توان دو سرعت رابطه مستقیم دارد.
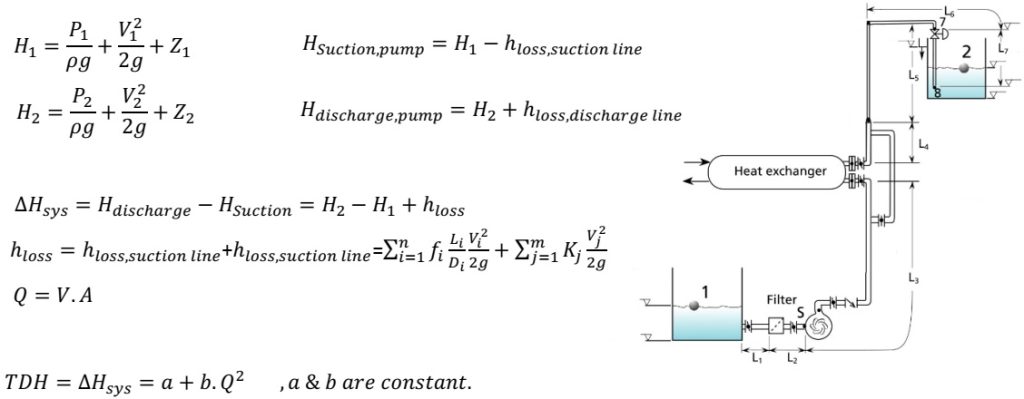
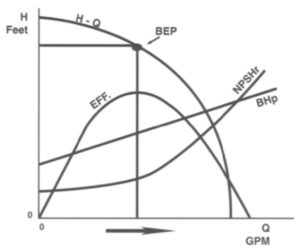
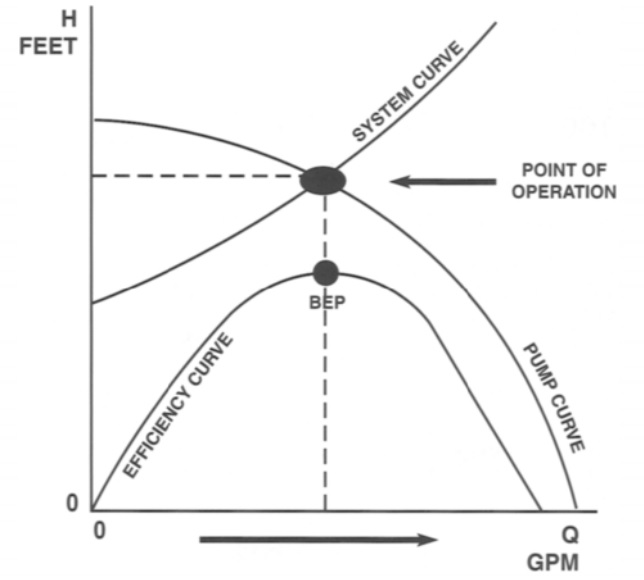
با توجه به رابطه بالا مشاهده می کنیم که هد منحنی مقاومت سیستم متناسب با هد استاتیکی (a) و هد دینامیکی (bQ2)، با توان دوم دبی سیال، است. هد استاتیکی ناشی از اختلاف هد سیال در منبع و مصرف کننده است و هد دینامیکی ناشی از افت انرژی سیال در لوله، شیر، اتصالات و تجهیزات است. باید توجه داشت که هر دو هد استاتیکی و دینامیکی در سیستم متغیر هستند. پمپ همیشه در محل تلاقی منحنی پمپ با منحنی مقاومت سیستم (Duty or Operating Point) عمل می کند. پس همانند منحنی زیر، طراحان سعی می کنند تا پمپی طراحی و انتخاب کنند که نقطه BEP پمپ برابر با TDH سیستم باشد.
به دو صورت می توانیم هد کل پمپ را محاسبه کنیم
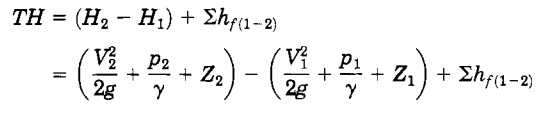
الف) اختلاف هد بین ورودی و خروجی پمپ را با توجه به رابطه زیر محاسبه کنیم:

ب) اختلاف هد بین هر دو نقطه دلخواه در دو سمت پمپ را با در نظر گرفتن افت هد اصطکاکی آن نقاط تا رسیدن به پمپ، با استفاده از فرمول زیر محاسبه کنیم:
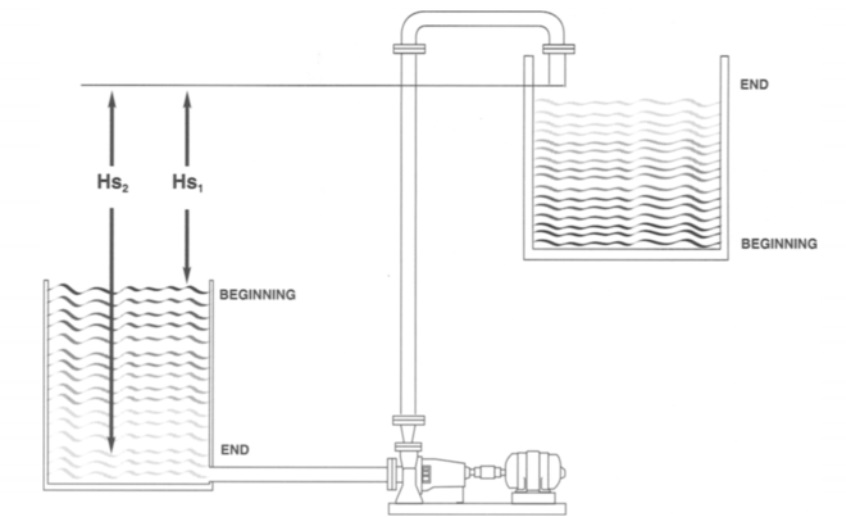
مثال) در سیستمی مطابق شکل زیر آب با دبی 227 متر مکعب بر ساعت از مخزن روباز شماره 1 به مخزن بسته شماره 2 با اطلاعات مشخص شده بر روی سیستم جابجا می شود. قطر لوله قبل از پمپ (Suction) 8 اینچ و بعد از پمپ (Discharge) 6 اینچ است. با فرض افت هد در لوله، اتصالات و شیرها برای مسیر قبل و بعد از پمپ به ترتیب برابر 0.91 و 7.62 متر، هد پمپ را محاسبه کنید؟
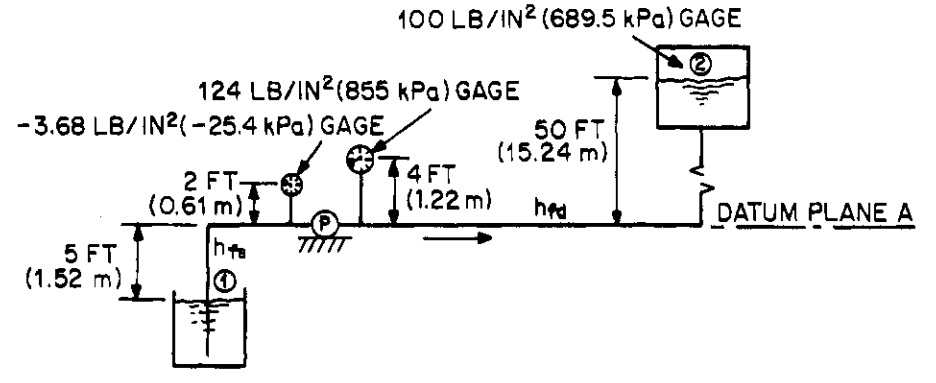
در ابتدا سرعت سیال در مسیر suction و discharge را محاسبه می کنیم.
با استفاده از روش (الف) و همچنین گیج های نصب شده در قبل و بعد از پمپ، هد پمپ را محاسبه می کنیم.

با استفاده از روش (ب) و استفاده از اطلاعات دو مخزن در ابتدا و انتهای سیستم، هد پمپ را به صورت زیر محاسبه می کنیم.

حالت های مختلف هد دینامیکی کل
تا اینجا فرض کردیم که منحنی مقاومت سیستم یکتا است یعنی تمامی پارامترها از جمله ارتفاع ها، فشارها و مقاومت های مدار ثابت باشند ولی در واقعیت اینطور نیست و این پارامترها متغیر هستند. در ادامه حالات مختلف بررسی می شود.
تغییر در ارتفاع
همانند شکل زیر در ابتدا مخزن ورودی پر از سیال است، پس هد استاتیکی برابر Hs1 است. با خالی شدن مخزن ورودی، هد استاتیکی به عدد Hs2 نزدیک می شود.
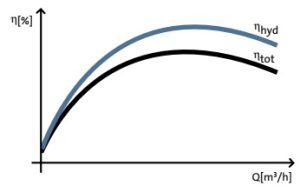
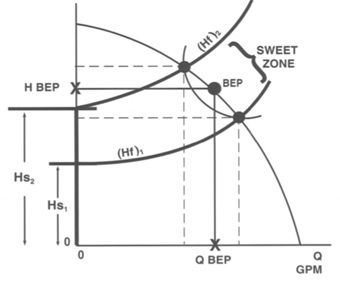
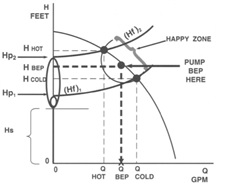
بنابراین منحنی مقاومت سیستم یک خط نیست بلکه یک پهنا دارد و باید هنگام انتخاب پمپ دقت کنیم تا منحنی عملکرد پمپ بین حداقل و حداکثر منحنی سیستم قرار گیرد. همانند منحنی زیر فرض می کنیم سیستم نیاز به دبی X دارد. پس نقطه BEP پمپ باید برابر دبی X بوده و بین دو منحنی سیستم قرار گیرد. در اینجا به خطوط هم بازدهی پمپ باید دقت کنیم تا نقطه عملکرد پمپ از بازدهی BEP خیلی فاصله نگیرد.
تغییر در فشار
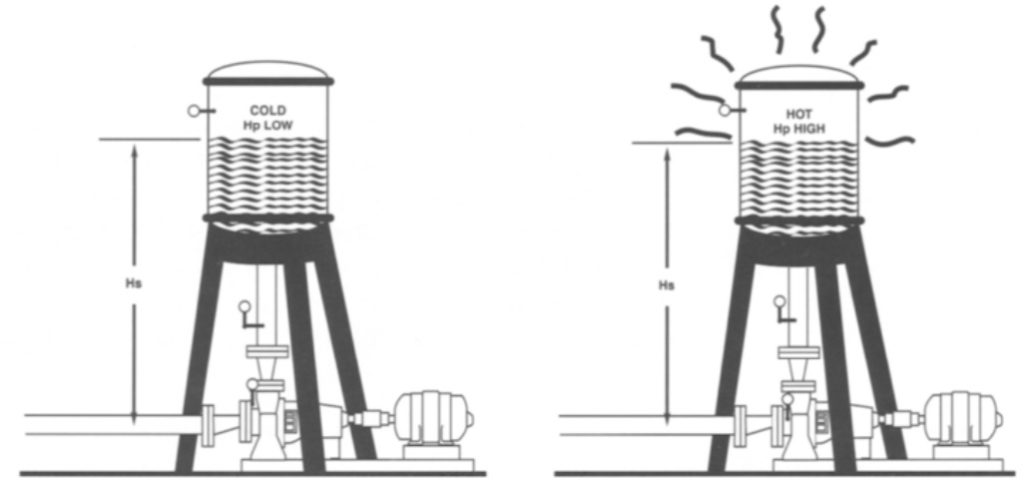
وقتی فشار در مخزن ورودی به پمپ یا در مخزن انتهایی متغیر باشد، هد دینامیکی کل سیستم نیز تغییر می کند. به طور مثال، در شکل زیر دمای سیال در مخزن ورودی پمپ تغییر می کند، به طبع آن فشار در مخزن هم تغییر می کند. همانند شکل زیر، منحنی عملکرد پمپ و منحنی مقاومت سیستم را ترسیم می کنیم.
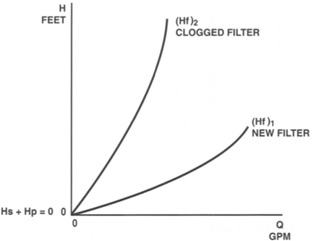
تغییر هد اصطکاکی سیستم
در خصوص تغییر هد اصطکاکی سیستم حالات مختلفی می تواند رخ دهد. به عنوان نمونه می توانیم به گرفتگی فیلتر، تغییر لوله کشی سیستم، رسوب گرفتگی لوله ها، تغییر دور موتور متصل به پمپ (به طبع آن تغییر دبی)، نصب تجهیز جدید در مسیر لوله کشی (فلومتر یا مبدل خنک کاری)، باز و بسته کردن شیر در خروجی پمپ و غیره اشاره کنیم. در این حالات باید حداقل و حداکثر دبی را مشخص کنیم و از روش های کنترلی استفاده کنیم. به طور مثال در خصوص گرفتگی فیلتر، می توانیم از سنسور فشار استفاده کنیم و وقتی به علت گرفتگی فیلتر فشار از یک حد مشخص فراتر رفت، فیلتر را تعویض کنیم.
برخی مواقع در تحلیل سیستم متوجه می شویم که پهنای تغییرات منحنی مقاومت سیستم خیلی گسترده است و با یک پمپ نمی توانیم تمامی حالات منحنی مقاومت سیستم را با بازدهی و عملکرد مناسب پوشش دهیم. در این حالات می توانیم از پمپ های سری یا موازی و یا ترکیب آنها بهره ببریم. در دروس آینده به پمپ های موازی و سری می پردازیم.
مراجع
Bachus, L. and Custodio, A. eds., 2003. Know and understand centrifugal pumps. Elsevier.